Moon Tracking SeaTel Ku band Marine Dish
A 32” xSatellite TV, SeaTel Marine, has been acquired with the aim of 10GHz EME. The dish is fitted with stepper motors for azimuth, elevation, and polarization.

Arduino software has been developed to control the stepper motors via Toshiba TB6600HG controllers as commanded by a USB serial link from a PC. The TB6600HG was chosen as it has built-in current limit and up to 6400 steps/rev capability. The latter provides a smooth, low vibration, but fast enough stepping.
Details of the stepper motor control may be found at Stepper Motor Controller and Moon Tracking for EME Digital Modes
The serial command function has been added to a PC time sync application developed in Visual Basic 6. This revision required the purchase of a surplus PC with Windows XP SP3. While Microsoft still support VB6 application in Windows 11, the support (and the installation of the VB6 IDE) for development is prohibited. This limitation complicated the development and testing of the software components of the project. Development and testing were split over three computers.
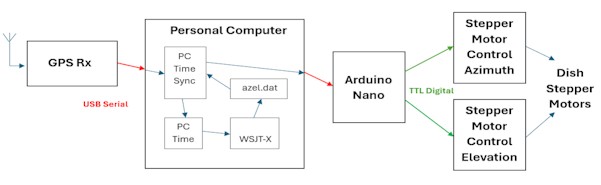
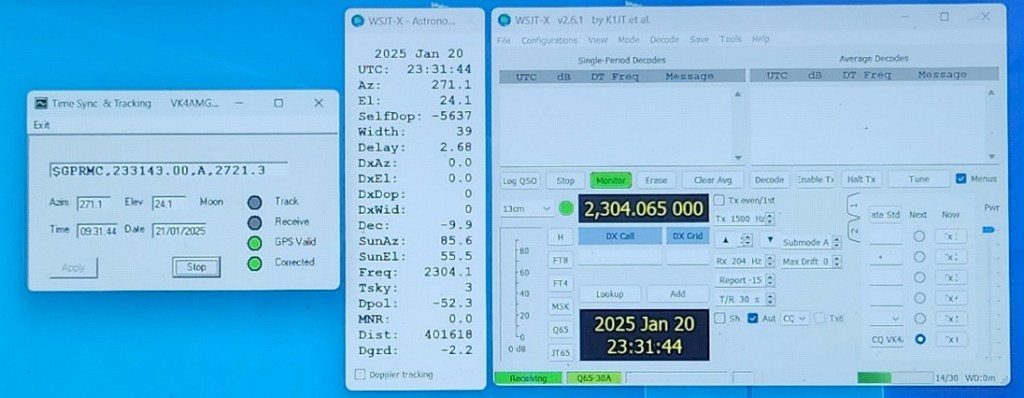
The PC time sync application receives USB serial NMEA RMC sentences from a uBlox Neo 6 GPS receiver. When valid GPS time is available, the PC time is corrected at 59 second UTC rollover. Revision of this application extracts from the WSJT-X c:\WSJT\tracking\azel.dat. Single decimal floating point data is provided. When the moon is above the horizon, commands to step the dish are sent using the “W az. El. format of the Yaesu GS232 rotator controllers. A graphic user interface (see Figure 2) presents the status of the application, GPS status, NMEA RMC messages, PC time, and Moon azimuth and elevation.
The Arduino software initializes the dish position by rotating the dish to a limit switch and then rotating to 180 degrees (North) position. During the latter the elevation is stepped down until its limit switch and then moved to its home of horizontal.
The azimuth and elevation are then tracked by motor step count. With 30+ steps per degree, the step size is less than 0.03 degree. To maintain the accuracy of the dish position and hysteresis is applied to the Arduini control algorithm. Position accuracy is better than 0.1 degree, the resolution of the WSJT data.
An hour test has been time lapse recorded and is available as a video at https://youtu.be/z_IkyuJAGeo . The next step is to test the tracking accuracy by video recording and correct any errors.
The time sync PC user interface with be further revised to allow real time azimuth and elevation adjustments and to provide a user interface to control the polarization of the dish feed.
The aim is to apply the approach to 23cm dish and 70cm four crossed Yagi array with Yaesu G-5500 and KR-400/KR500 rotators. The Arduino process for these EME solutions will control standard switch control with potentiometer position feedback.
