Schematic
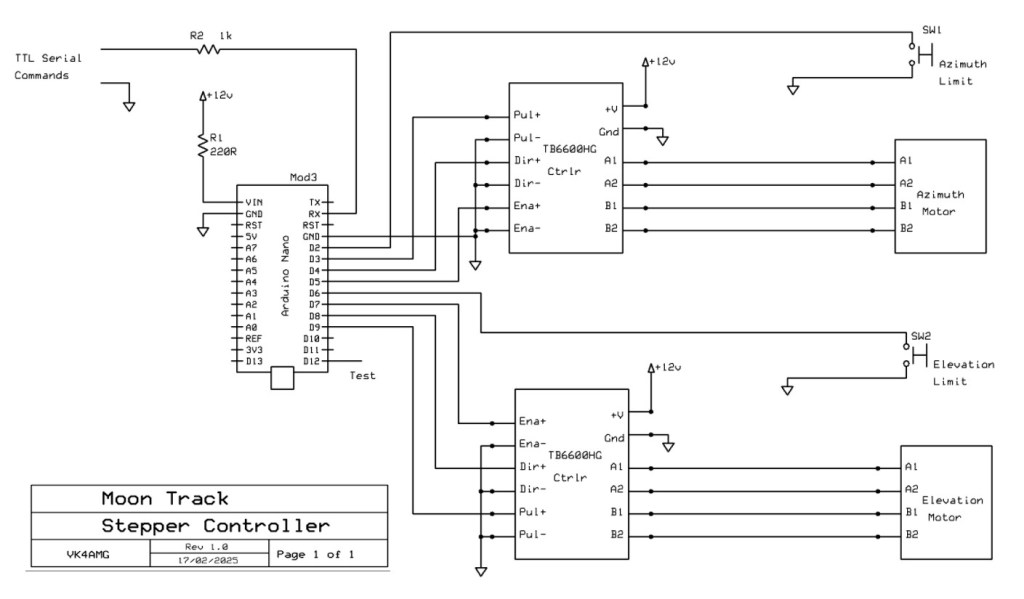
An Arduino Nano controls the SeaTel stepper motors for azimuth and elevation via two TB6600HG stepper motor controllers. For application note and manual see dfrobot.com. The site also sells motors and controllers. https://dfimg.dfrobot.com/nobody/wiki/0bcc0b661ce7750ff7d0134bfc3e88b3.pdf
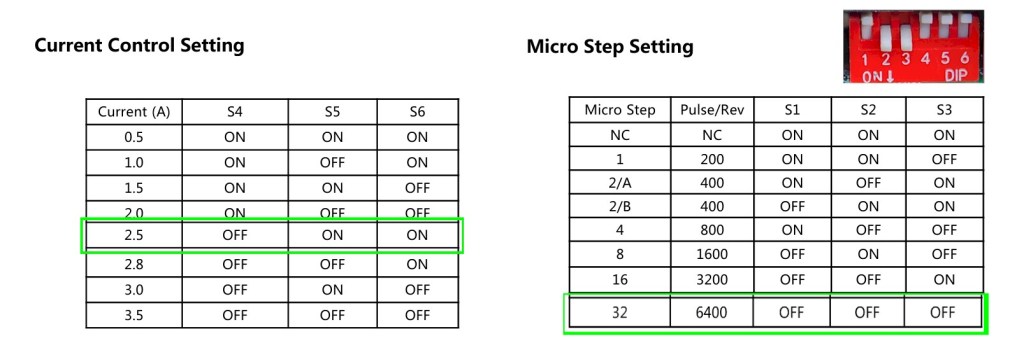
The TB6600HG was chosen as it has built-in current limit and up to 6400 steps/rev capability. The latter provides a smooth, low vibration, but fast enough stepping. Setting for the SeaTel are above.
Software Design Note
Stepper motor controller is TB6600 (See http://www.DFRobot.com) Requires Direction and pulse TTL inputs Selectable phase drive (1/1, 1/2, 1/4, 1/8, 1/16, & 1/32 step) Up to 6400 steps per revolution on 200 steps per rev motors. TB6600 handles up to V and has selectable current limit 0.5 to 3.5A
SeaTel x satellite TV dish is designed for up to 540 deg azimuth with 33.33 steps per degree. -10 to 90 deg elevation 26.6 steps per degree. Limit switches at -180 azimuth and -10 elevation.
Software is novel in that it uses Timer1 overflow interrupts (4ms approx) to pulse the stepper motor controller. Flags from main loop control stepping and direction. The timer and its interrupts are initialised in setup().
After timer IRQ are active, setup() initializes the dish using the limit switches then stepping azimuth to north (0/360) and elevation to horizontal 0 degrees. Initialization routines are locking (no code execution except timer interrupts until complete). Main loop is then executed with flags controlling the state machine and stepping.
Commands are read from USB serial in GS232 like format “W az.i el.e “. Format is checked by frame length, header, range of azimuth and elevation. Azimuth and elevation step concurrently once commands are passed. Stepping is terminated when step count reaches command count.
A test pin output is provided to allow the IRQ service time to be measured. The main loop includes a 100ms delay, in which serial commands from the PC application are buffered, parsed, and executed.
Arduino Software
A copy of the software (.zip) may be downloaded from https://www.dropbox.com/scl/fi/ijg2isuuacwh95q4i2hb8/20241227_Nano_AzEl_Timer1_Stepper_El-goer-VK4AMG.zip?rlkey=ck7epqcr141lsfuqgt83ylmem&st=yv8kd0ay&dl=0 The file is provided for information without guarantees as the suitability of the software for your application. It is provided as is and may contain defects and errors. Email questions may be answered. Otherwise, no support is provided. <mycallsign> at WIA.org.au
